伺服控制系统的工作原理与技术分析
伺服控制器与伺服驱动电机的高精度性能,适用于工业自动化系统和工业门领域,下面我们来谈伺服控制器的工作原理与伺服控制系统的技术分析。
下为伺服电机与伺服控制器图片:

1)开环进给伺服系统
开环进给伺服系统的原理与图1相似,只是没有检测与反馈单元(包括相应的位置和速度检测元件),驱动电机只能用步进电机,因为通过脉冲既可以控制其速度(脉冲的频率),又可以控制其位置(脉冲的个数)。
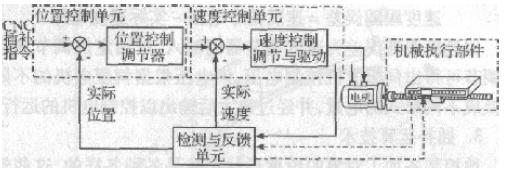
图1 进给伺服系统的原理图
开环进给伺服系统的工作原理如图2所示。

图2 开环进给伺服系统工作原理图
系统接受来自CNC插补指令,即该轴在插补周期内的位移量,按该系统的脉冲当量,将位移量转换成相应的脉冲个数n 和脉冲频率,输出给脉冲环形分配器,由它将脉冲逐一分配给步进电机各相的驱动电源,经其放大后驱动步进电机运行。
2)闭环和半闭环进给伺服系统的工作原理
闭环和半闭环进给伺服系统所使用驱动电机通常是直流伺服电机和交流伺服电机。由于这类驱动电机只能控制其速度,不能控制其位置,当用于位置控制系统时,只能采用闭环或半闭环控制,不能用于开环控制,所以系统的结构要比开环的复杂。
系统接受来自CNC 插补指令,即该轴在插补周期内的位移量,并以该位移量和由检测与反馈单元测得的执行部件的实际位置值,作为位置控制单元的输入,经过比较器比较,即得位置跟随误差:
跟随误差=位置指令值-实际位置值
以跟随误差为位置控制调节器的输入,按给定的调节规律(P、PI、PID 或其他方法)计算出速度指令值,经数模转换(D/A)后变成速度指令电压,该电压即为速度控制单元的一个输入量。
速度控制单元以位置控制单元输出的速度指令电压和由检测与反馈单元测得的实际速度值为输入,经过比较器比较,即得速度跟随误差:
速度跟随误差=速度指令电压-实际速度电压
以速度跟随误差为速度调节器的输入,按给定的调节规律进行调节可得出伺服电机控制电压,该电压根据伺服电机的不同将变换成不同形式的电量,并经过放大后输出以控制电机的运行。